네덜란드의 자전거 인프라는 환상적입니다. 제 고향인 위트레흐트의 자전거 타는 사람들은 비둘기만 아니었다면 세상에서 가장 행복한 사람들이 되었을 것입니다.
어느 순간, 당신은 시원한 바람이 얼굴을 때리는 가운데 햇빛 아래에서 자전거를 타고 있는 자신을 발견하고, 다음 순간에는 길을 벗어나는 자신을 발견하게 됩니다. 또 다른 순간, 비둘기는 자신이 처한 위험을 모르는 듯 당신이 가는 길을 따라 배회합니다. 나는 자랄 때 그녀가 생각도 없이 교통에 몰래 들어가는 것이 얼마나 어리석은 일인지 종종 궁금해했습니다. 수년 후, 나는 집단 지능과 비행 경로에 관한 PLOS Biology 저널에 발표된 새로운 연구에서 다시 한번 비둘기 지능에 대해 의구심을 갖게 되었습니다.
이 연구는 일반적으로 나의 선입견이 정확할 수 있음을 시사했지만, 나의 새로운 연구 결과의 일부 세부 사항은 비둘기가 내가 상상했던 것보다 더 똑똑할 수 있음을 시사했습니다.
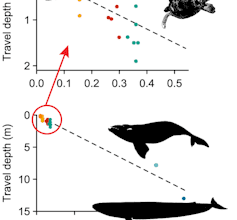
몇 년 전, 나는 아직 비둘기의 지능에 대해 감명을 받지 못했을 때 생물학자 Takao Sasaki와 Dora Biro가 쓴 2017년 논문을 접했습니다. 그들의 연구는 비둘기가 특정 위치에서 풀려났을 때 어떻게 집으로 돌아오는지를 결정했습니다. 처음에 새들은 다소 간접적인 경로를 찾습니다. 그런 다음 각 연속 릴리스에서 정확히 동일한 트랙을 기억하고 재생하는 것 같습니다.
그러나 Sasaki와 Biro는 순진한 비둘기가 경험이 많은 비둘기와 짝을 이루었을 때 그들의 새로운 경로가 약간 더 효율적이라는 것을 보여주었습니다. 여러 세대에 걸쳐 연구자들은 한 쌍의 경험이 더 많은 새를 순진한 새로 교체했습니다. 안정적인 쌍이 계속해서 동일한(보다 우회적인) 경로를 계속해서 비행하는 동안, 세대 교체로 인해 각 세대는 A 지점에서 B 지점으로 더 직접적인 경로에 조금 더 가까워졌습니다.
일부 학자들은 이것을 누적문화의 한 사례로 간주했다. 이는 사회적 학습을 통해 다른 사람에게 전달되어 성과를 향상시키고 시간이 지남에 따라 반복되어 지속적인 개선을 가져오는 새로운 행동입니다. 이 마지막 개념은 심리학에서 “래칫(ratchet)”이라고도 알려져 있습니다.
비둘기의 축적된 문화가 우리의 것과 유사한지에 대한 논쟁은 과학자들 사이에서 여전히 격렬합니다. 그러나 이러한 화장실과 산책로에 대한 누적된 개선 사항은 내 관심을 불러일으켰고 그들이 어떻게 했는지 알고 싶었습니다. Sasaki와 Biro는 새들이 정보를 축적하고 그들의 성과를 평가할 수 있다고 제안했습니다.
나로서는 지능이 필요하지 않은 경로를 누적적으로 개선할 수 있는 방법이 있지 않을까 하는 생각이 들었다. 그래서 저는 컴퓨터 시뮬레이션을 사용하여 새 항해의 단순화된 모델을 개발했습니다. 저는 의사소통이나 복잡한 사고 없이 트랙 개선을 보여줄 수 있는 로봇 비둘기를 만들고 싶었습니다.
로봇식 욕실 모델은 네 가지 구성 요소로 구성되었습니다. 비둘기는 자신의 집이 태양과 지구의 자기장을 사용하는 위치를 대략적으로 알고 있습니다. (사람들이 비둘기 머리에 자석을 붙여서 탐색을 방해했기 때문에 우리는 이것을 알고 있습니다.) 그들은 또한 함께 나는 것을 좋아하는 것 같으며, 비행 방향을 맞추는 것은 그룹 활동의 필수적인 부분입니다. 세 번째 요소는 경로 메모리입니다. 같은 위치에서 풀려난 비둘기는 길을 따라 있는 랜드마크를 이용하여 같은 경로로 집으로 날아갑니다. 마지막으로, 비행 경로는 연속적인 경향이 있습니다. 이렇게 하면 불규칙한 패턴을 피하면서 갑작스러운 급회전 가능성이 줄어듭니다.
Sasaki와 Biro가 실제 비둘기를 가지고 했던 것처럼, 나는 내 로봇 비둘기가 단독으로, 쌍으로, 세대를 번갈아가며 “비행”하도록 했습니다. 각 세대마다 경험이 많은 로봇이 순진한 로봇으로 대체되었습니다. 의사소통이나 생각이 없는 고도로 단순화된 비둘기 버전임에도 불구하고 로봇은 성공적으로 A 지점에서 B 지점으로 비행하고 이상한 경로를 기억하며 누적된 개선을 보여주었습니다.
컴퓨터 모델의 좋은 점은 모델을 분해하여 작동 방식을 확인할 수 있다는 것입니다. 로봇의 설정을 조정함으로써 세대 교체가 있는 쌍이 일반적으로 제어 조건(세대 없음)의 쌍보다 성능이 뛰어난 조건을 보여줄 수 있습니다. 또한 누적 경로 개선이 나타나기 위해서는 목표 방향, 사회적 근접성 및 경로 메모리가 필요하다는 것을 보여주기 위해 두 구성 요소를 모두 끌 수도 있습니다.
마지막 질문은 Sasaki와 Biro의 연구에서 비둘기가 계속해서 더 효율적인 경로를 찾는 이유였습니다. 이것의 일부는 분명합니다. 각각의 새로운 순진한 로봇 비둘기는 경험이 더 많은 동료로부터 특정 경로를 배울 수 있습니다. 그러나 이것이 경로가 개선된 이유를 설명하지는 않습니다. 순진한 비둘기가 실제로 여기에서 경험 많은 비둘기를 도운 것으로 밝혀졌습니다.
그들은 따라갈 미리 정해진 경로가 없었지만 목표가 어디에 있는지 대략적으로 알고 있었습니다. 이로 인해 그들은 목표 방향으로 경로를 약간 더 벗어나게 되었고, 새로운 듀오의 경로가 약간 더 효율적이도록 미묘하게 편향되었습니다.
이번 연구는 의사소통이나 복잡한 사고가 없어도 세대 간 궤적의 누적 개선이 발생할 수 있음을 보여주었습니다. 이는 목표 위치에 대한 귀환 비둘기의 생각, 이전 경로에 대한 기억 및 서로 달라붙는 경향에 따라 달라집니다.
이것은 비둘기가 정말 멍청하다는 뜻인가요?
내 모델은 Sasaki와 Perrault의 비둘기 데이터와 유사한 궤적을 생성했으며 새가 어리석은 방식으로 행동할 수 있음을 보여주었습니다. 그러나 모델의 매개변수 추정치는 매우 다양했습니다. 비둘기가 혼자 날 때, 안정된 쌍으로 날 때, 또는 세대를 번갈아 가며 날 때도 약간 달랐습니다.
이는 비둘기가 기계적이지 않다는 것을 의미합니다. 각 새는 서로 다른 방식으로 행동하며 상황에 적응했을 수 있습니다. 비둘기의 행동은 일반적으로 모델을 따르지만 모델이 포착하지 못하는 영리한 일을 할 수도 있습니다.
이에 대한 예는 엔지니어링 과학자 Gabriele Valentini와 그의 동료들이 Sasaki와 Peru의 데이터를 사용하여 2021년에 실시한 연구에서 찾을 수 있습니다. 이 연구는 순진한 비둘기와 노련한 비둘기 쌍에서 누가 ‘리더십’을 차지했는지 분석했습니다. 연구원들은 쌍으로 탐색하는 것이 놀랍도록 민주적이며, 순진한 비둘기와 경험 많은 비둘기가 모두 주도적으로 경로를 탐색하여 경로를 개선한다는 사실을 발견했습니다.
비록 이러한 새로운 도로가 때때로 우연히 자전거 도로와 교차하더라도 이는 확실히 지능의 한 형태일 수 있는 것처럼 들립니다.